Adaptive Robot Teaching
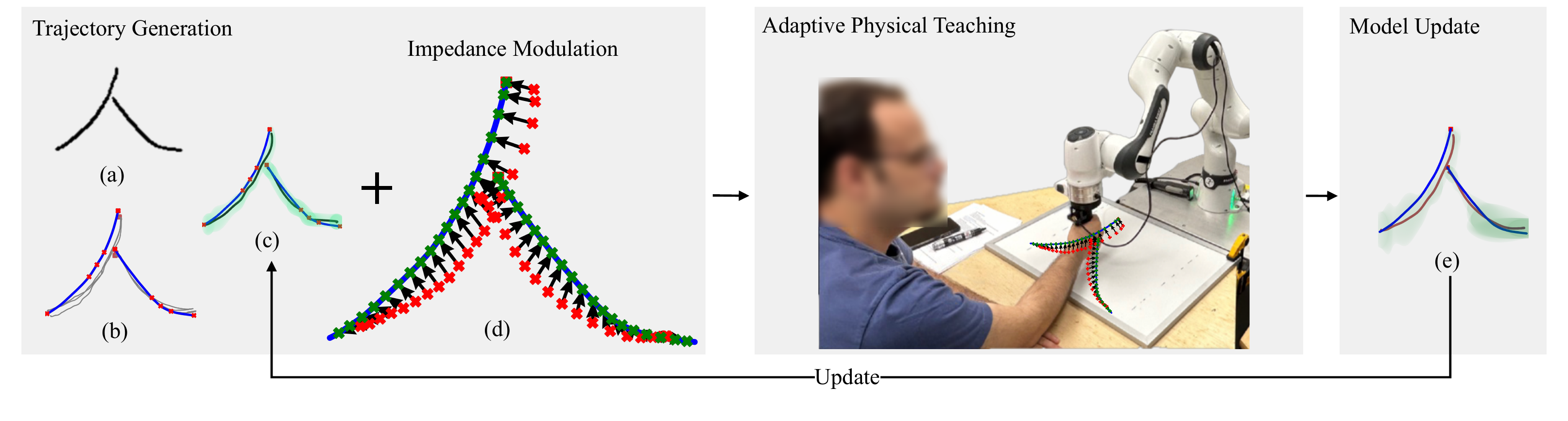
TeachingBot learns the learner's writing style, extracts training waypoints, and updates both trajectory and impedance for physical teaching.
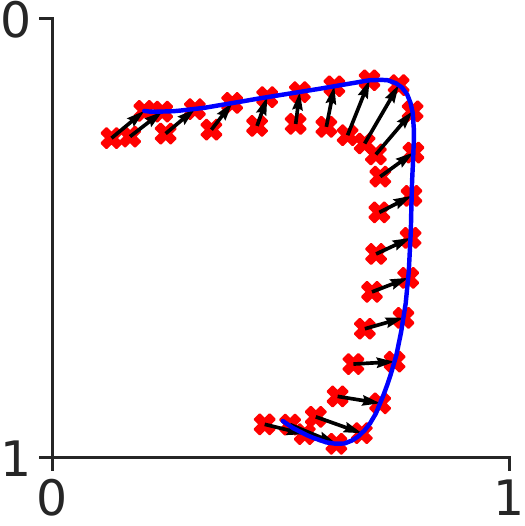
Personalized trajectory: Writing samples are modeled probabilistically so the robot can generate guidance that balances the target reference with the learner's natural style.
Variable impedance: Physical guidance is adjusted over training so the robot can provide support while preserving active learner engagement.