
Cunjun Yu
Hi! I'm a PhD student at the National University of Singapore, under the guidance of Professor David Hsu. My research aims to build human-centric robots grounded in principled models of perception, decision-making, and interaction, so that they can (1) understand and follow human instructions, (2) collaborate with humans as capable partners, and (3) teach humans new skills, such as collaborating effectively, writing Chinese calligraphy, playing air hockey, and driving.
I am deeply grateful for the opportunity to have previously interned at ![]() NVIDIA Research and
NVIDIA Research and ![]() Toyota Research Institute, where I gained invaluable experiences.
Toyota Research Institute, where I gained invaluable experiences.
Github Google Scholar LinkedIn
cunjun dot yu at gmail dot com
News (Expand)
Publications ( show selected / show all by date )

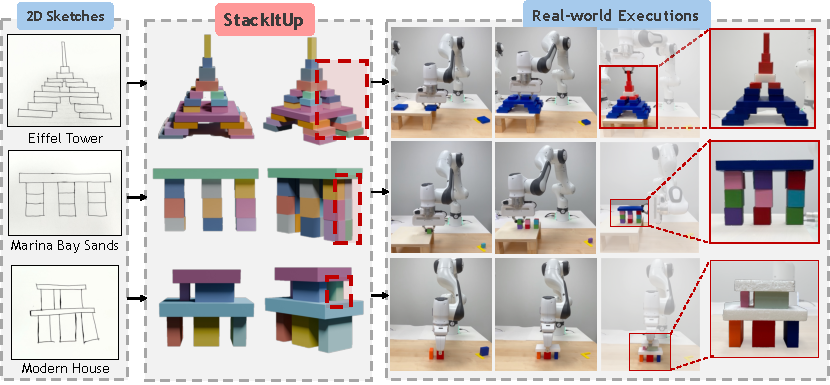
“Stack It Up!": 3D Stable Structure Generation from 2D Hand-drawn Sketch
Conference on Robot Learning (CoRL), Oral Presentation, 2025

GSON: A Group-based Social Navigation Framework with Large Multimodal Model
Robotics and Automation Letters (RA-L), 2025
Robi Butler: Remote Multimodal Interactions with Household Robot Assistant
International Conference on Robotics and Automation (ICRA), 2025
InsActor: Instruction-driven Physics-based Characters
Neural Information Processing Systems (NeurIPS), 2023
DiffMimic: Efficient Motion Mimicking with Differentiable Physics
International Conference on Learning Representations (ICLR), 2023

DaXBench: Benchmarking Deformable Object Manipulation with Differentiable Physics
International Conference on Learning Representations (ICLR), Notable Top 5%, 2023
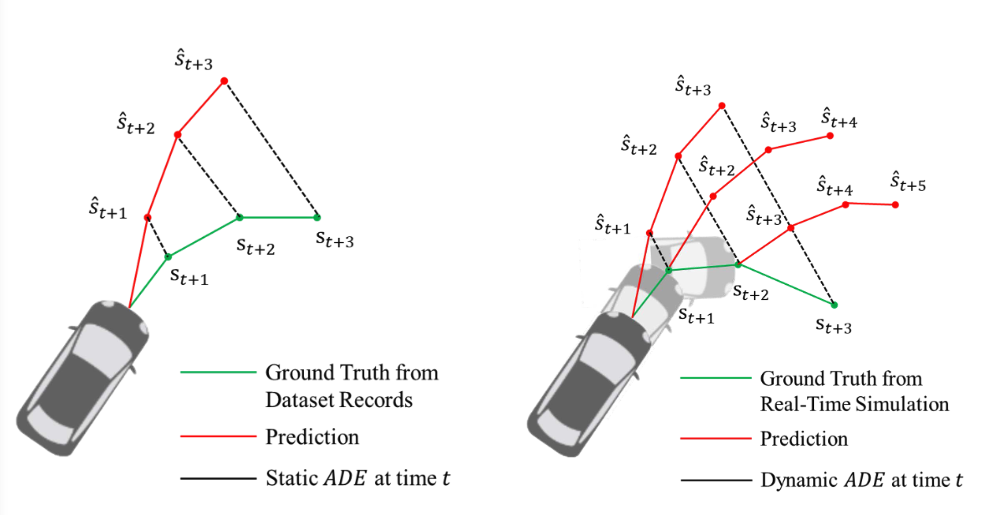
What Truly Matters in Trajectory Prediction for Autonomous Driving?
Neural Information Processing Systems (NeurIPS), 2023
PDF • Project Page • Code
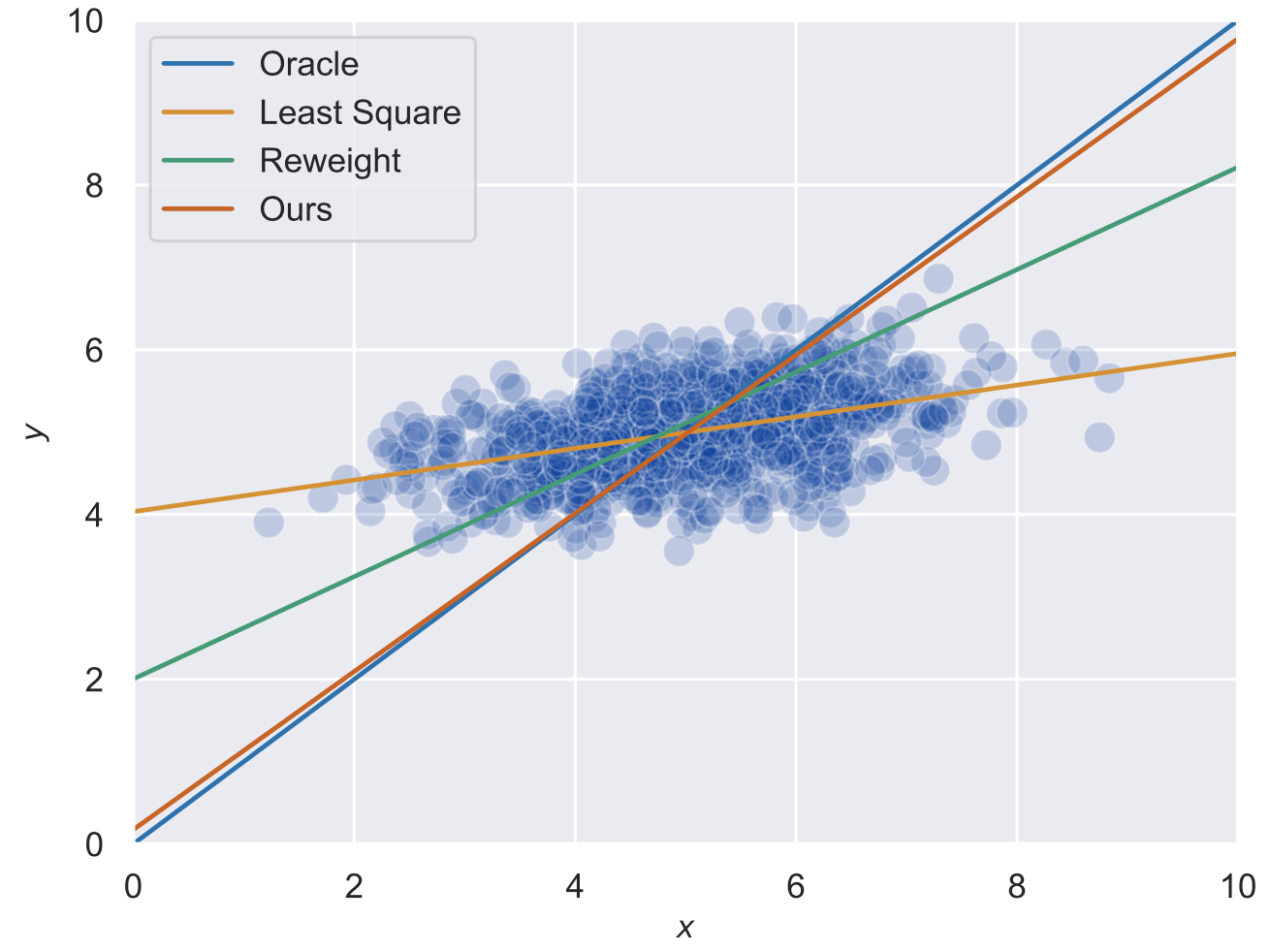
Balanced MSE for Imbalanced Visual Regression
Conference on Computer Vision and Pattern Recognition (CVPR), Oral Presentation, 2022
PDF • Code • Project Page
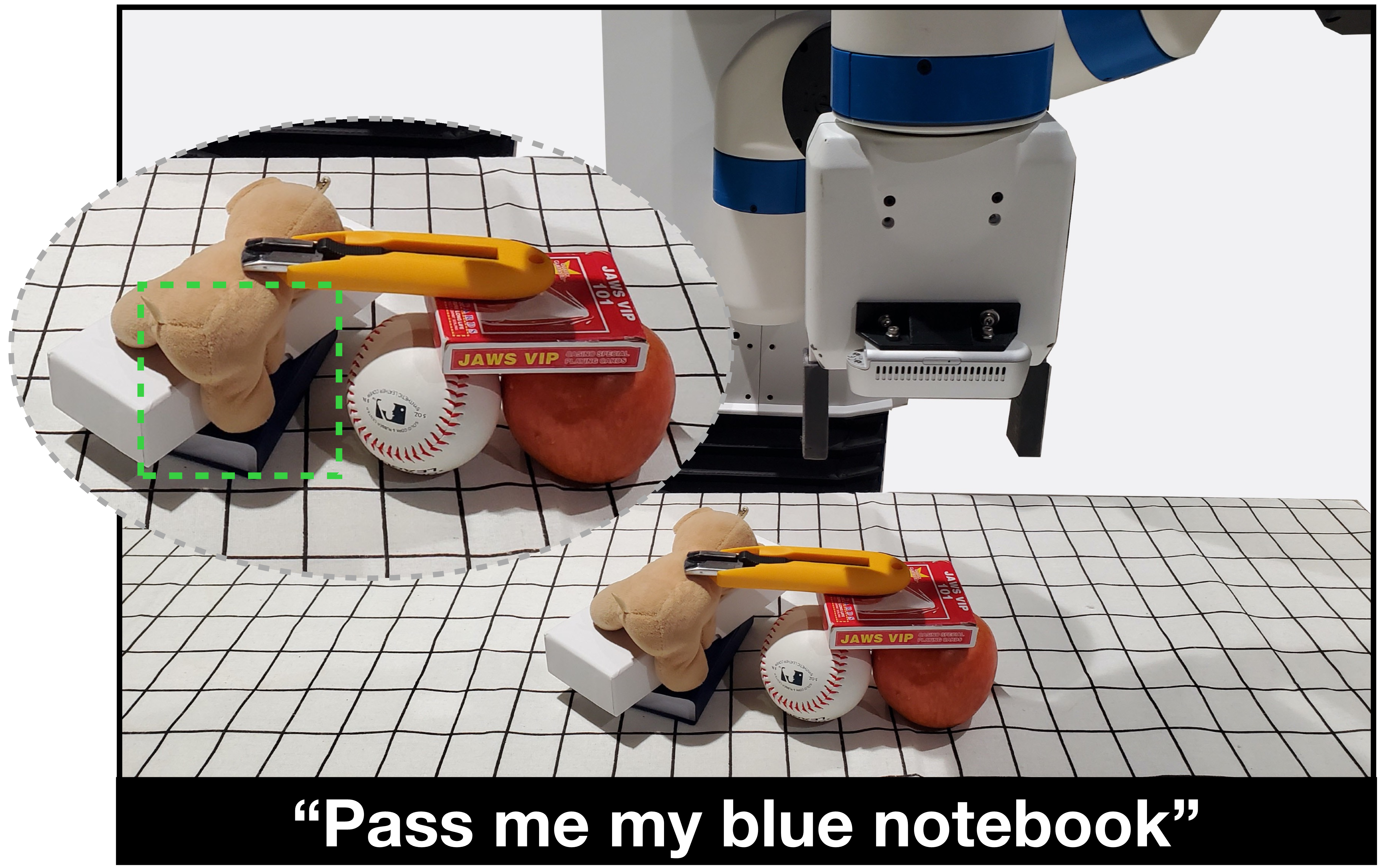
INVIGORATE: Interactive Visual Grounding and Grasping in Clutter
Robotics: Science and Systems (RSS), 2021
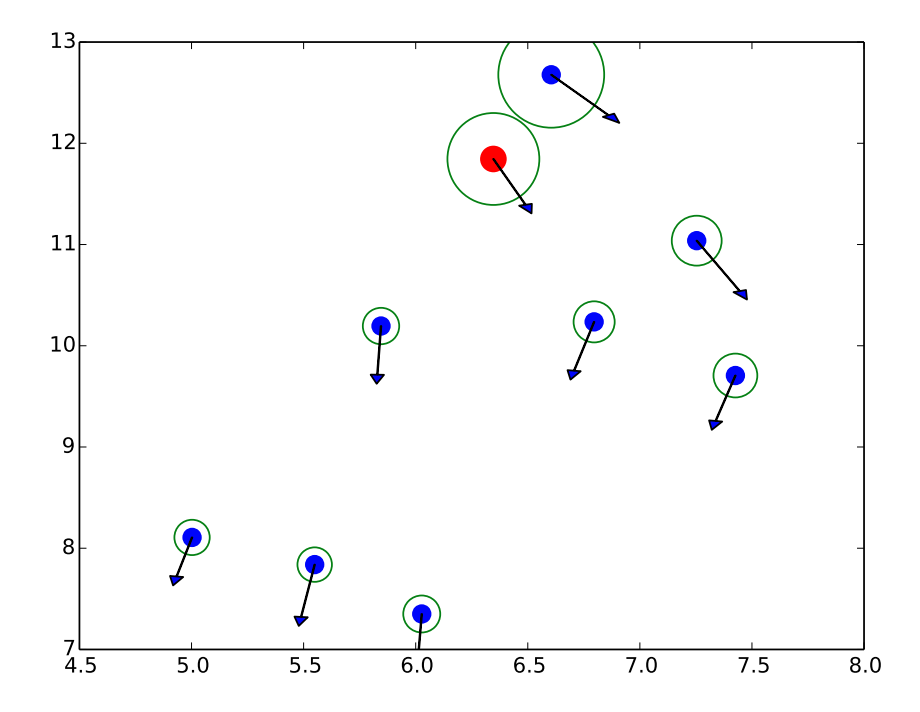
Spatio-Temporal Graph Transformer Networks for Pedestrian Trajectory Prediction
European Conference on Computer Vision (ECCV), 2020
PDF • Code • Project Page • Video
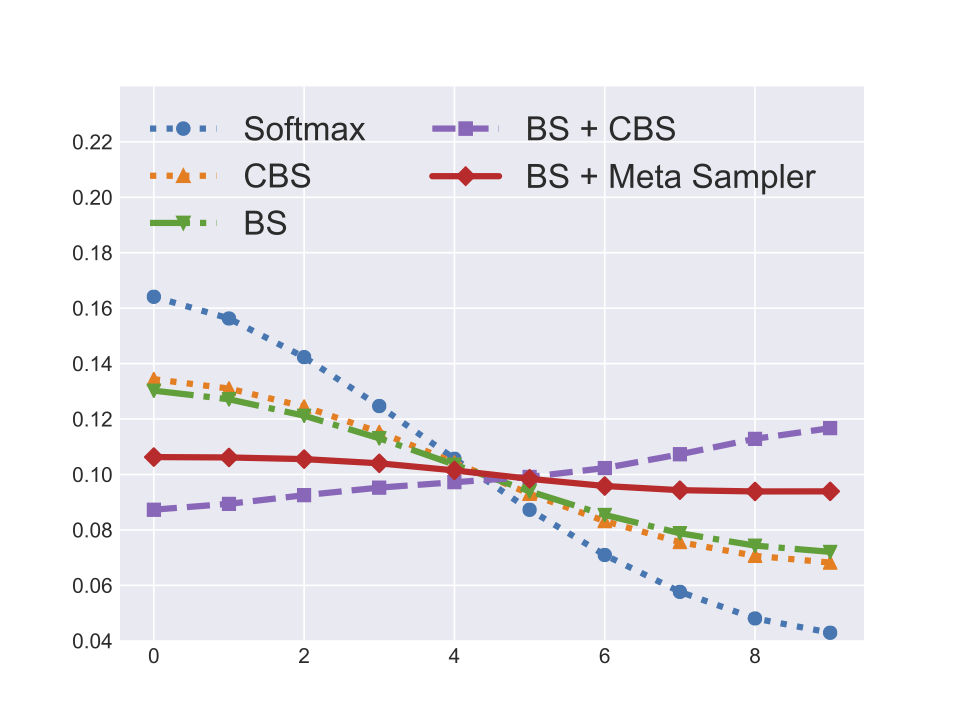
Balanced Meta-Softmax for Long-Tailed Visual Recognition
Neural Information Processing Systems (NeurIPS), 2020
Arxiv • Code • Project Page
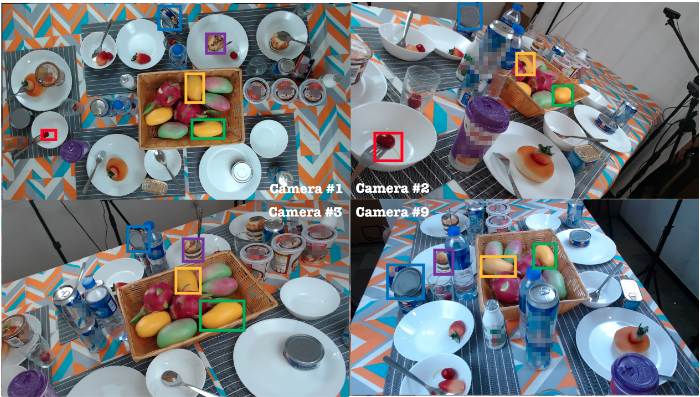
MessyTable: Instance Association in Multiple Camera Views
European Conference on Computer Vision (ECCV), 2020
Arxiv • Code • Project Page

Siamese Convolutional Neural Network for Sub-millimeter-accurate Camera Pose Estimation and Visual Servoing
International Conference on Intelligent Robots and Systems (IROS), 2019